NANUK Features - NANUK
Nanuk - Features
The Nanuk has a variety of standardized features, but is highly customizable to fit all your needs.
Custom Design
Wide Range of Functions
- Configurable, customizable modular design
- For hazardous outdoor, indoor, and GPS-denied environments
- Autonomous, semi-autonomous, and manual navigation & mapping modes
- Long range semi-autonomous operations with data/video/status transmission
- Autonomous operation over & around objects
- Near real-time map acquisition & portrayal
- Near real-time sensor data, status and alerts
- Able to carry and tow heavy loads
- Operates continuously for 8 hours and more
- Optional armored version with bulletproof target payload


Perform Multiple Tasks
In Diverse Environments
- Deployment in challenging and hazardous outdoor and indoor environments
- Data acquisition, recording, reporting
- Payload and sensor transport/operations
- Autonomous robot targets and swarms
- Autonomous ops in unmapped areas
- Semi-autonomous ops via GPS waypoints
- Interoperability with IoT platform
- Repetitive monitoring/measurement tasks in most weather/terrain/light conditions
- Carrying/maneuvering heavy loads and diverse types of sensors and payloads
Three Modes
Autonomous, Semi-Autonomous, and Manual
- Semi-Autonomous - GPS Waypoints - Users can input a series of geographic waypoints via the mobile controller. Nanuk will follow the specified path from origin to end point and return to origin.
- Autonomous - Wander and React - Nanuk will navigate a random pattern, detecting/avoiding obstacles. Optionally, it can react to any perceived threats or obstacles and take evasive action.
- Manual or Autonomous - Return Home - Nanuk can return to start position autonomously and on command.
- Manual - Users can take control of all Nanuk functions via the remote controller at any time.


Additional Control Features
Customizable for Your Needs
- Geo-fencing - Ensures Nanuk doesn’t leave specified boundaries or areas.
- UGV Mobile Controller - Direct, remote control of one or more Nanuk UGVs.
- Configuration Scenarios - Users can specify Nanuk goals and paths.
- Maps - Creation of 2D and 3D occupancy and other maps.
- Standard Onboard Sensors - 3D LiDAR, IMU, 2D/3D cameras, GPS, wheel encoders, laser distance sensors.
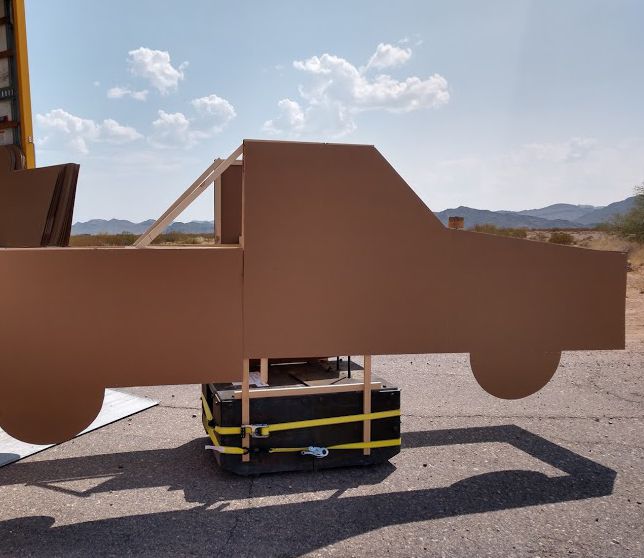
Robotic Target
For Ballistic Training
- Nanuk Model 200 UGV can be used as a robotic target for ballistic training.
- Includes autonomous and semi-autonomous navigation features of the standard Model 200.
- Armored to withstand ballistic impacts up to .50 caliber rounds.
- Detects and indicates ballistic impacts using visual signals and reports to the control unit.
- Can be equipped with 2D and 3D targets, representing human figures or full-size vehicles.